
Այս նախագիծը նկարագրում է, թե ինչպես կարելի է DC շարժիչը տեղափոխել առաջ կամ հակառակ ուղղությամբ՝ օգտագործելով հեռուստացույց կամ DVD հեռակառավարման վահանակ:Նպատակն է կառուցել մի պարզ երկկողմանի շարժիչ շարժիչ, որն օգտագործում է մոդուլացված ինֆրակարմիր (IR) 38 կՀց հաճախականությամբ իմպուլսային գնացք՝ առանց որևէ միկրոկարգավորիչի կամ ծրագրավորման օգտագործման:
Հեղինակի նախատիպը ներկայացված է նկար 1-ում:

Միացում և աշխատանք
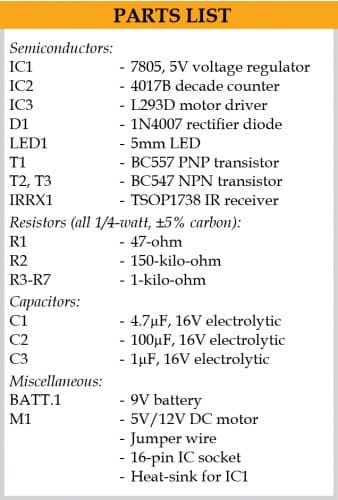
Ծրագրի սխեման ներկայացված է Նկար 2-ում: Այն կառուցված է IR ընդունիչ TSOP1738 (IRRX1) մոդուլի շուրջ, տասնամյակի հաշվիչ 4017B (IC2), շարժիչի շարժիչ L293D (IC3), PNP տրանզիստոր BC557 (T1), երկու BC547 NPN տրանզիստորներ ( T2 և T3), 5V կարգավորվող սնուցման աղբյուր (IC1) և 9V մարտկոց:
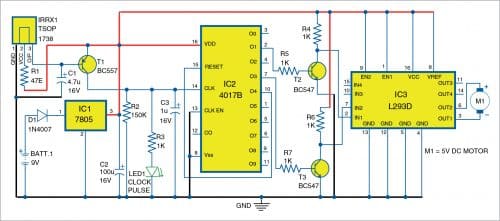
9V մարտկոցը միացված է D1 դիոդի միջոցով 7805 լարման կարգավորիչին, որպեսզի ստեղծի նախագծի համար անհրաժեշտ 5V DC:C2 կոնդենսատորը (100µF, 16V) օգտագործվում է ալիքների մերժման համար:
Նորմալ վիճակում, IRRX1 IR մոդուլի ելքային պտուտակը 3-ը գտնվում է տրամաբանական բարձր մակարդակի վրա, ինչը նշանակում է, որ տրանզիստոր T1-ը միացված է դրան, և դրա կոլեկտորի տերմինալը գտնվում է տրամաբանական ցածր մակարդակում:T1-ի կոլեկտորը մղում է տասնամյա IC2 հաշվիչի ժամացույցի զարկերակը:
Հեռակառավարման վահանակը ուղղելով դեպի IR մոդուլ և սեղմելով որևէ ստեղն, մոդուլը հեռակառավարման վահանակից ստանում է 38 կՀց IR իմպուլսներ:Այս իմպուլսները շրջվում են T1-ի կոլեկտորի մոտ և տրվում են IC2 տասնամյակի հաշվիչի ժամացույցի մուտքագրման 14 փին:
Ժամանող IR իմպուլսները մեծացնում են տասնամյակի հաշվիչը նույն արագությամբ (38 կՀց), սակայն IC2-ի ժամացույցի մուտքագրման 14-րդ կետում RC ֆիլտրի (R2=150k և C3=1µF) առկայության պատճառով իմպուլսների գնացքը հայտնվում է որպես մեկ իմպուլս հաշվիչը։Այսպիսով, յուրաքանչյուր ստեղնը սեղմելիս հաշվիչը առաջ է շարժվում միայն մեկ հաշվարկով:
Երբ հեռակառավարման ստեղնը բաց է թողնվում, C3 կոնդենսատորը լիցքաթափվում է R2 դիմադրության միջոցով, և ժամացույցի գիծը դառնում է զրո:Այսպիսով, ամեն անգամ, երբ օգտատերը սեղմում և արձակում է հեռակառավարման ստեղնը, հաշվիչը ստանում է մեկ իմպուլս իր ժամացույցի մուտքի մոտ, և LED1-ը վառվում է՝ հաստատելու, որ զարկերակը ստացել է:
Գործողության ընթացքում կարող է լինել հինգ հնարավորություն.
Դեպք 1
Երբ հեռակառավարման ստեղնը սեղմվում է, առաջին զարկերակը գալիս է, և տասնամյակի հաշվիչի O0 ելքը (IC2) բարձրանում է, մինչդեռ O1-ից մինչև O9 կապանքները ցածր են, ինչը նշանակում է, որ T2 և T3 տրանզիստորները գտնվում են անջատման վիճակում:Երկու տրանզիստորների կոլեկտորները բարձր վիճակի են քաշվում 1 կիլոգրամ օմ դիմադրությամբ (R4 և R6), այնպես որ L293D (IC3) շարժիչի շարժիչի IN1 և IN2 մուտքային տերմինալները բարձրանում են:Այս փուլում շարժիչը անջատված վիճակում է:
Դեպք 2
Երբ ստեղնը նորից սեղմվում է, CLK գծին հասնող երկրորդ զարկերակը մեկով ավելացնում է հաշվիչը:Այսինքն, երբ երկրորդ զարկերակը գալիս է, IC2-ի O1 ելքը բարձրանում է, մինչդեռ մնացած ելքերը ցածր են:Այսպիսով, տրանզիստորը T2-ն անցկացնում է, իսկ T3-ը անջատվում է:Ինչը նշանակում է, որ T2-ի կոլեկտորի մոտ լարումը նվազում է (IC3-ի IN1), իսկ T3-ի կոլեկտորի լարումը դառնում է բարձր (IC3-ի IN2) և շարժիչի վարորդի IC3-ի IN1 և IN2 մուտքերը դառնում են համապատասխանաբար 0 և 1:Այս վիճակում շարժիչը պտտվում է առաջ ուղղությամբ:
Դեպք 3
Երբ ստեղնը մեկ անգամ էլ սեղմվում է, երրորդ զարկերակը, որը հասնում է CLK գծին, կրկին մեծացնում է հաշվիչը մեկով:Այսպիսով, IC2-ի O2 ելքը բարձրանում է:Քանի որ ոչինչ միացված չէ O2 պինին, իսկ O1 և O3 ելքային կապերը ցածր են, ուստի և T2 և T3 տրանզիստորները անցնում են անջատման վիճակի:
Երկու տրանզիստորների կոլեկտորային տերմինալները բարձր վիճակի են քաշվում 1 կիլոգրամանոց R4 և R6 ռեզիստորներով, ինչը նշանակում է, որ IC3-ի IN1 և IN2 մուտքային տերմինալները դառնում են բարձր:Այս փուլում շարժիչը կրկին անջատված վիճակում է:
Դեպք 4
Երբ ստեղնը ևս մեկ անգամ սեղմվում է, չորրորդ զարկերակը, որը հասնում է CLK գծին, չորրորդ անգամ մեծացնում է հաշվիչը մեկով:Այժմ IC2-ի O3-ի ելքը բարձրանում է, մինչդեռ մնացած ելքերը ցածր են, ուստի տրանզիստոր T3-ը վարում է:Դա նշանակում է, որ T2-ի կոլեկտորի մոտ լարումը դառնում է բարձր (IC3-ի IN1), իսկ T3-ի կոլեկտորում լարումը դառնում է ցածր (IC3-ի IN2):Այսպիսով, IC3-ի IN1 և IN2 մուտքերը գտնվում են համապատասխանաբար 1 և 0 մակարդակներում:Այս վիճակում շարժիչը պտտվում է հակառակ ուղղությամբ:
Դեպք 5
Երբ ստեղնը սեղմվում է հինգերորդ անգամ, CLK գծին հասնող հինգերորդ զարկերակը ևս մեկ անգամ ավելացնում է հաշվիչը:Քանի որ O4-ը (IC2-ի 10-րդ կետը) միացված է IC2-ի ներածման 15-րդ փին Վերականգնել, հինգերորդ անգամ սեղմելով տասնամյակի հաշվիչի IC-ը վերադարձնում է միացման միացման վիճակին՝ O0 բարձրությամբ:
Այսպիսով, միացումն աշխատում է որպես երկկողմանի շարժիչի շարժիչ, որը կառավարվում է ինֆրակարմիր հեռակառավարման վահանակով:
Շինարարություն և փորձարկում
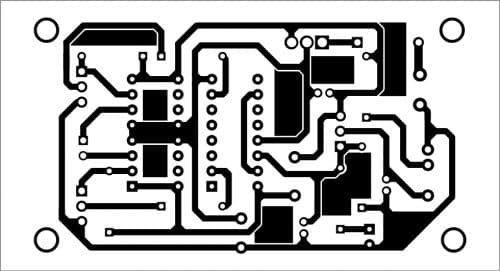
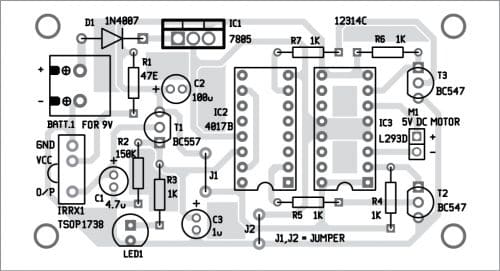
Շղթան կարող է հավաքվել Veroboard-ի կամ PCB-ի վրա, որի իրական չափի դասավորությունը ներկայացված է Նկար 3-ում: PCB-ի բաղադրիչների դասավորությունը ներկայացված է Նկար 4-ում:
Ներբեռնեք PCB և բաղադրիչի դասավորության PDF ֆայլերը.Սեղմեք այստեղ
Շղթան հավաքելուց հետո միացրեք 9V մարտկոցը BATT.1-ով:Գործողության համար դիմեք Ճշմարտության աղյուսակին (Աղյուսակ 1) և հետևեք վերևում 1-ից մինչև Գործ 5-ում նկարագրված քայլերին:
Լիզայի խմբագրությամբ
Հրապարակման ժամանակը` 29-2021թ